
 Tüm Kategoriler
Tüm Kategoriler 


 - 10Nm, 55rpm, RS-485")
 - 10Nm, 55rpm, RS-485")
 - 10Nm, 55rpm, RS-485")
Dynamixel MX-106R Akıllı Servo Motor (Smart Actuator) - 10Nm, 55rpm, RS-485
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
Dynamixel MX-106R Dijital Servo Aktüatör : MX Serisi En Yüksek Torklu Servo / RS-485 Seri
Üzerinde MX-106 Kullanılan bir dört ayaklı robot
Dynamixel MX-106R servo motor(aktüatör), MX serisinin en yüksek tork üreten motorudur. 4 pinli RS-485 haberleşmeyi destekler. Barındırdığı büyük ve güçlü DC motor ve güç tüketiminin sebep olduğu ısıyı dağıtmak için alüminyum ön gövdeye (kapak) sahiptir (Diğer modellerin tersine -AR şeklinde isimlendirilmemiştir!)
Dynamixel servo aktüatör kontrolü Arduino kartlar ile yapılabilir; bu amaçla üretilen Arduino Dynamixel Shield kartı işinizi oldukça kolaylaştıracaktır!

İncelediğiniz bu ürün MX-106R:
- 14.8V gerilimde 10 [N.m] tork ve 55rpm hız değerine ulaşır.
- 4.5Mbps maksimum baud rate ile AX ve RX serisi servo motorlardan daha hızlıdır.
- Yapısal özellik farkı
o MX-106T ile: MX-106T, 3 pinli TTL haberleşmeyi desteklerken 106R (bu ürün) 4 pinli RS-485 haberleşmeyi desteklemektedir.
o Hem MX-106R hem MX-106T de isimlendirme şekli MX-64 ve MX-28'ler ile karşılaştırıldığında plastik ön gövde (kapak) intibası uyandırsa da her iki üründe de alüminyum ön gövde (kapak) mevcuttur.
- MX-106R ile uyumlu denetleyici (controller), frame set, horn set ve gear set ürünleri için aşağıdaki bölümü kontrol ediniz!
- MX serisi, birden fazla servo kontrolüne ve aşırı derecede hassas servo kontrolüne imkan sağlayan Protokol 2.0 desteği sunar. Daha basit paket yapısına sahip ve varsayılan olarak gelen Protokol 1.0 yapısından 2.0 yapısına protokol güncellemesi yapılabilir. Farklı model Dynamixel servolarla çalışabilmek için servoların aynı protokol desteğine sahip olduğundan emin olun!
- MX serisinde servo motor çeşitleri tork bakımından MX-12W
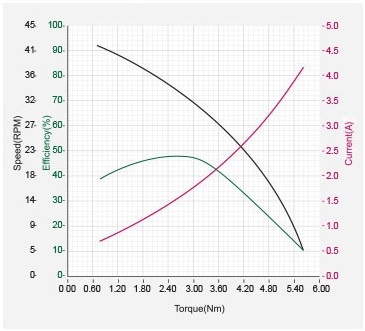
- Performans parametreleri:
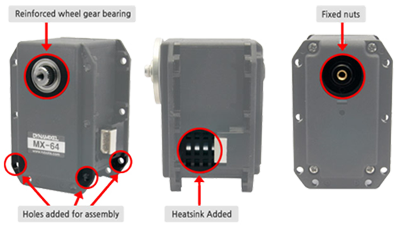
- MX-106 servolarda tıpkı MX-64 aktüatörler ilave montaj deliği, heatsink ve güçlendirilmiş dişli yatak yapısı gibi bazı modifikasyonlar içermektedir.
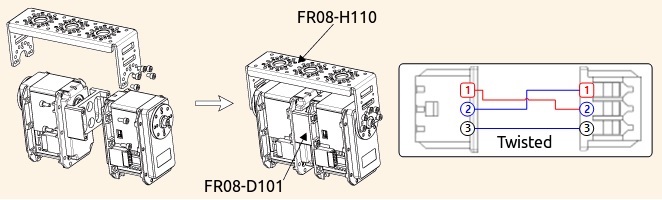
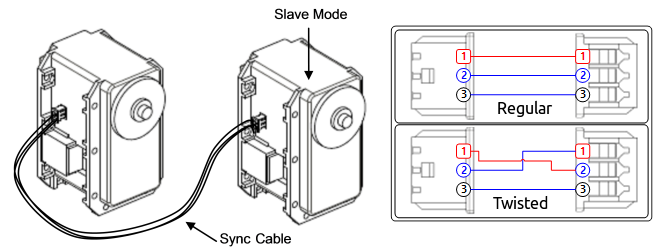
- MX serisi Dynamixel lerde sadece MX-106 akıllı servo motorlarda iki servoyu tek eklemde kullanmak için Dual Mode özelliği vardır. Slave servo master servo ya SYNC Kablosu ile bağlanmalıdır. Bu durumda Slave servo, PWM ile Master tarafından kontrol edilir ve slave servonun dönüş yönü SYNC kablo tipi (Regular veya Twisted) ile belirlenir. Master/Slave kullanılan servolar bir frame(şase) parçası ile birleştirilmeli ve bu şekilde tam senkronizasyon sağlanmalıdır.
MX serisi robot aktüatörlerinde yerleşik özellikler:
 Temazsız Mutlak Enkoder
Temazsız Mutlak EnkoderMX serisi aktüatörler potansiyometre yerine 360° dönme açısını 12 bit çözünürlükte okuyabilen manyetik rotary (mutlak) enkoder barındırır ve çok daha hassas hareket sunabilir.
 PID Kontrol
PID KontrolMX serisi servo aktüatörler PID kontrol sağlar. PID kontrol, yapısal (backlash) ve süreç kaynaklı hataları otomatik olarak düzeltir. Dolayısıyla pozisyonlama daha hassastır.
 360° 12 Bit ile KodlanırMX serisi servo motorlarda şaftın bir tam dönüşü, 4096 seviye ile kodlanabilir ve 0.088° / adım çözünürlüklü hareketlerin oluşturulmasına veya okunmasına imkan sunar.
360° 12 Bit ile KodlanırMX serisi servo motorlarda şaftın bir tam dönüşü, 4096 seviye ile kodlanabilir ve 0.088° / adım çözünürlüklü hareketlerin oluşturulmasına veya okunmasına imkan sunar. Akım Tabanlı Tork Kontrolü
Akım Tabanlı Tork KontrolüMX-64 ve MX-106'da, pozisyon ve hız kontolü çift-döngülü (dual-loop) akım kontolü sayesinde gerçekleştirilmektedir.
Dynamixel Servo Aktüatörlere Yakından Bakalım:
o Tüm Dynamixel servo motorlar DC Motor + Mikrodenetleyici + Sürücü + Sensör + Redüktör + Ağ Bağlantı Elemanları bileşenleri barındıran hepsi bir arada (all-in-one) aygıtlardır; enerji verdikten ve haberleşme bağlantılarını sağladıktan sonra robot kontrolü ne başlayabilirsiniz. Ücretsiz kaynak kodlar hızlı başlangıç sağlar!

o Dynamixel robot servoları RC servolardan ayırın! Robot eklemleri hedeflenerek tasarlanan Dynamixel'ler;
- Eklemli yapının kurulumu için kasa üzerinde montaj noktaları ve arka yüzde de bir tutturma noktası (anchor point) barındırır ve her yönden montajlanabilir,
- Çift yönlü haberleşir ve geri besleme sinyali üreterek istenen parametrenin büyüklüğünü döndürebilir, daisy-chain bağlantıları destekler,
- Ortalama bir RC servonun iki katı kadar tork üretebilir,
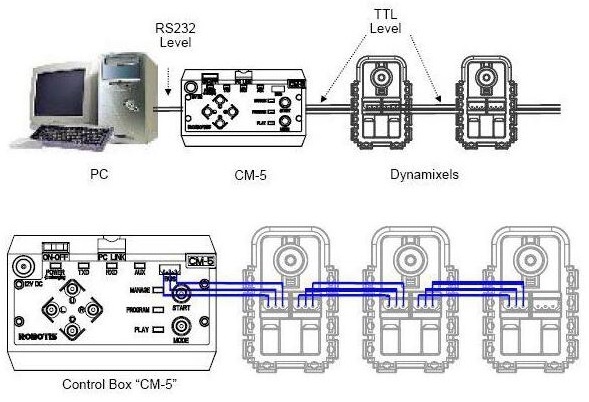
- Üzerindeki yerleşik denetleyici geri besleme sinyali üretebilir ve mevcut gelen firmware gereksinime göre upgrade edilebilir.o Dynamixel zincir bağlantı (daisy-chain) şeklini destekler ve 254 e kadar servo birbirine bağlanabilir. Daisy Chain yani zincir bağlantı sistemi ile birbirlerine bağladığınız akıllı servo motorların sonuncusunu data ve besleme hattına bağladığınızda, tek hat üzerinden hiç bir kablo karmaşası olmadan Dynamixel servolarınızın hepsini besleyebilir ve kontrol edebilirsiniz.
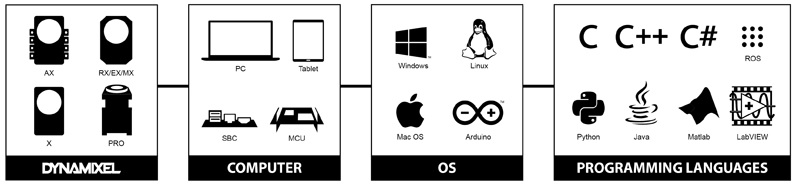
o Dynamixel aktüatörler farklı geliştirme ortamlarınca desteklenirler (Bknz, aşağıdaki görsel). Robotis'in sunduğu RoboPlus (R+) GUI tabanlı arayüz programları sayesinde simulatif programlama veya ters kinematik uygulamaları yapabilirsiniz. Dynamixel robot servo kontrol kodlarını C, C++, Matlab, C#, Python, ROS, Visual Studio, Visual Basic, LabVIEW, Eclipse, Java ve daha bir çoklarıyla yazabilirsiniz.
o Veri geribesleme ve kontrol modları:
- Konum Kontrolü, Hız Kontrolü, Akım (Tork) Kontrolü, PWM Kontrolü için farklı modlar (Tekerlek, eklem vb...),
- Dynamixel Firmware ile konum, hız, akım, sıcaklık, voltaj, donanım durumu öğrenmek için gerçek zamanlı geri bildirim,
- Kullanıcıların hassas hareketler oluşturabilmeleri için konum ve hız kontrolü sağlayan PID kontrol (MX, Pro ve Pro Plus serilerinde)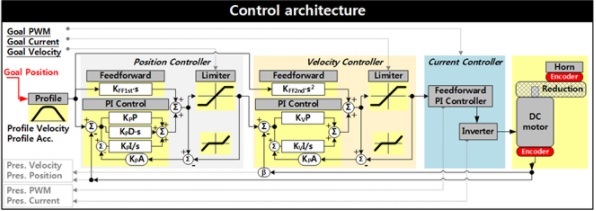
o Dynamixel servo motor çeşitleri
- Başlangıç seviyesinden yüksek performans ürünlere farklı seriler
- Spur dişli gibi alt uçtaki ürünlerden (Dynamixel serisi) sikloid dişli gibi üst uçtaki ( Dynamixel Pro ) ürünlere...
- Dynamixel'in konumlanmasına göre nüvesiz ucuz motorlardan BLDC motorlara doğru faklı parça tercihi
o Dynamixel motorların geniş kullanım alanı:
- Mafsallı robotlar, mobil robotlar, manipülatör (endüstriyel robot kol), otomasyon sistemi
- Eğitim robotları, Ar-Ge robotları, eğlence amaçlı robotlar ve DIY robotlar
- Medikal, savunma, hizmet, havacılık, üretim hatları gibi alanlarda tekli /çoklu kullanımÜrün Özeti ve Paket İçeriği Ürün Teknik Özellikleri:
MCU :ARM CORTEX-M3 (72 [MHz], 32Bit) Pozisyon Sensörü :Temazsız Mutlak Enkoder (12Bit, 360 [°]) Motor :Çekirdeksiz Maxon Motor Baud Rate :8,000 [bps] ~ 4.5 [Mbps] Kontrol Yöntemi :PID Backlash :20 [arcmin] (0.33 [°]) Ağırlık :165g Boyut (WxHxD) :40.2 x 65.1 x 46 [mm] Çözünürlük Açı / Adım / Açı :0.088° / 4096 / 360° Redüksiyon Oranı 225:1 Giriş Gerilimi :10.0 ~ 14.8 [V] (Önerilen : 12.0 [V]) Stall Tork -8.0 [N.m] (@11.1 [V], 4.8[A]stall akımı)-8.4 [N.m] (@12 [V], 5.2[A]stall akımı)-10.0 [N.m] (@14.8 [V], 6.3[A]stall akımı)Yüksüz Hız -41 [devir/d] (@ 11.1 [V])
-45 [devir/d] (@ 12 [V])
-55 [devir/d] (@ 14.8 [V])Radyal Yük :40N (Flanştan 10mm uzakta) Eksenel Yük :20N Çalışma Modu(Protokol 1.0||Protokol 2.0)1) Wheel, P1.0 || Velocity Control P2.02) Joint, 0 - 360° P1.0 || Position Control P2.03) Multi-turn P1.0 || Extended Position Control P2.04) - || PWM (Voltage) Control P2.05) - || Current Control P2.06) - || Current-based Position Control P2.0Çalışma Sıcaklığı :-5℃ ~ +80℃ Fiziksel Bağlantı- RS-485 Half Duplex Asenkron Seri Hab.(8bit, 1stop, No Parity)- Protokol 1.0 (varsayılan) ve Protokol 2.0Link :RS-485 Level Multi Drop Bus ID (P1.0 veya P2.0) : 254 ID (0~253) P1.0 || 253 ID (0 ~ 252) P2.0 Geri Besleme :Pozisyon, Sıcaklık, Yük, Giriş Voltajı - P1.0
:Pozisyon, Hız, Sıcaklık, Yük, Giriş Voltajı, Yörünge, Gerçek zamanlı Tick - P2.0
Dişli Malzemesi :Full Metal / Spur Kasa Malzemesi :Metal (Ön), Mühendislik Plastiği (Orta, Arka) MX-106 İle Kullanılabilen Robotis Ürünleri:
-- Denetleyici:
TTL Dynamixel = CM-5, CM-510, CM530, CM-700, OpenCM9.04 + OpenCM485 Expansion Board, OpenCR, RS485 Dynamixel = CM-700, OpenCM9.04(+ OpenCM485 Expansion Board), OpenCR, CM-2+ -- AraYüz Kartı: USB2Dynamixel, U2D2
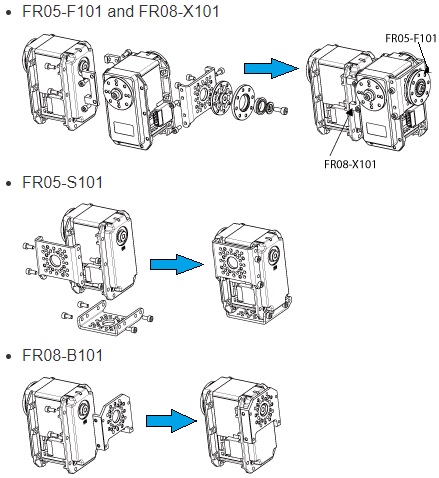
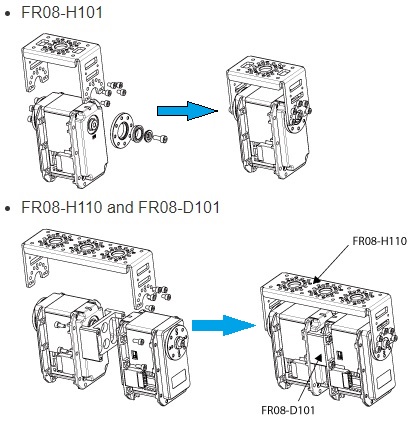
-- Frame (Şase):





FR08-B101K FR05-F101K frame FR08-H101 frame FR05-S101 frame FR08-H110 frame FR08-H101K frame FR05-S101K frame FR08-H110K frame 
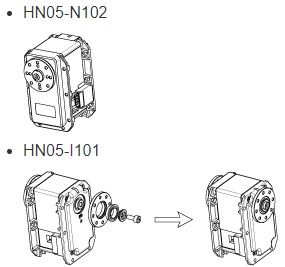
FR08-D101K -- Horn (Flanş):
-- Gear Set: MX-106R Dişli Set
MX-106R Kutu İçeriği:
Açıklama Adet DYNAMIXEL MX-106R 1 Flanş NH05-N102 1 Pul Yatak Pulu 1 Kablo 4P Kablo 200mm 1 Kablo 4P Sync Kablo 160mm 1 Vida/Somun Vida(WB) M2.5*4 16 Vida(WB) M3*8 1 Somun M2.5 18 NOT: MX-106R kutularında montajlama için bir frame (şase) parçası yoktur, ayrı temin edilir!
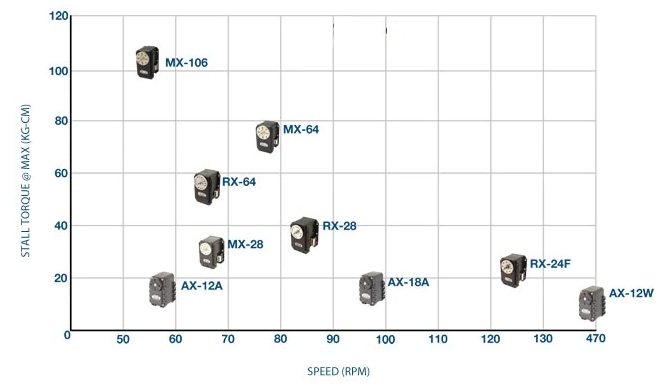
MX Serisi Karşılaştırma MX Serisi Performans Görünümü:
Dynamixel MX Serisi, Seri İçi Görünüm:
Model MX-28T-R / MX-28AR-AT MX-64T-R / MX-64AR-AT MX-106T / MX-106R Stall Tork (@ 14.8V) 3.1N.m (31.6 kg-cm) 7.3N.m / 74.4 kg-cm 10.0N.m / 101 kg-cm Hız (rpm @ 14.8V) 67 78 55 Çalışma Voltajı 10 ~ 14.8V ( önerilen 12V) 10 ~ 14.8V ( önerilen 12V) 10 ~ 14.8V ( önerilen 12V) Stall Akımı (@ 14.8V) 1.7A 5.2A 6.3A Ebatlar (mm) 35.6 X 50.6 X 35.5 40.2 X 61.1 X 41 40.2 X 65.1 X 46.0 Ağırlık 72g-77g 126g-135g 165g Çözünürlük 0.088°/pulse 0.088°/pulse 0.088°/pulse Redüksiyon Oranı 193:1 200:1 225:1 Yerleşik CPU ARM CORTEX-M3 (32bit, 72M) ARM CORTEX-M3 ARM CORTEX-M3 Com TTL & RS-485 / 4.5 Mbps TTL & RS-485 / 4.5 Mbps TTL & RS-485 / 4.5 Mbps Compliance/PID PID PID PID Pozisyon Sensörü Mutlak Enkoder (12Bit, 360 [°]) Mutlak Enkoder (12Bit, 360 [°]) Mutlak Enkoder (12Bit, 360 [°]) MX-106R ve Farklı Şaseler (Frame Set) ile Çok Yönlü Bağlantı Şekillleri Dynmixel MX-106R Flanş (Horn) ve Şase (Frame) Bağlantı şekilleri:
MX-106 Frame (Şase) Parçaları Bağlantıları
MX-106 Horn (Flanş) Parçaları Bağlantıları
Montaj Kombinasyonları:
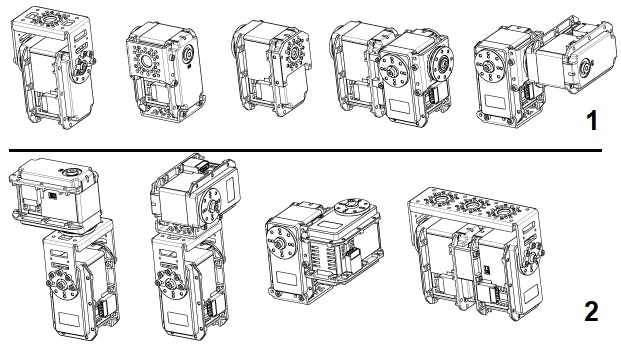
Bağlantılar


























- 3.1Nm, 67rpm, RS-485")
 - 3.1Nm, 67rpm, TTL")
 - 3.1Nm, 67rpm, TTL")
- 3.1Nm, 67rpm, RS-485")
 - 0.2Nm, 470rpm")