
 Tüm Kategoriler
Tüm Kategoriler 



Dynamixel-X XM540-W270-T Mid-Level PERF Servo Motor | 10.6Nm, 30rpm, TTL
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
Dynamixel-X XM540-W270-T Yüksek Performans Servo Motor | 10.6Nm, 30rpm, TTL
Dynamixel-X serisi servo motorlar; çok eklemli robotlar yapmak için kullanılan, yüksek performanslı ve ağ kontrollü yeni Robotis servo motor serisidir.
Dynamixel XM serisi servo aktüatörler, XH serisine tork ve hız olarak benzer ürünlerdir ancak XM serisi servo motorlarda Maxon çekirdeksiz motor yerine standart bir çekirdeksiz motor kullanılmıştır. Buna göre XM serisi XH serisine göre daha uygun fiyatlı ancak ömür uzunluğu hassasiyet ve çalışma gürültüsü olarak orta düzey performans sergileyen bir üründür. XM430 ve XM540 olarak iki farklı boyut iki farklı redüksiyon oranı ve TTL/RS-485 haberleşebilen seçenekleriyle 8 farklı XM serisi servo motor projeleriniz için hazır, hemen deneyin!
Bu ürün XM540-W270-T:
XM540-W2700-R XM X= Yeni Dynamixel-X servo motor grubu M=Mid-Level Performance ürün serisi 540 540 = 58.5mm yüksekliğe sahip servoları içine alan boyut sınıfı W270 W= 12V nominal besleme voltajı 270= 270:1 redüksiyon oranı T T= TTL haberleşme arayüzü - Nominal çalışma gerilimi:12V, stall tork: 10.1 [N.m] (@ 12.0 [V]) ve yüksüz hız: 30 [dev/d] (@ 12.0 [V])
- Haberleşme arayüzü 3 uçlu TTL
- Konnektör uçları altın kaplama JST
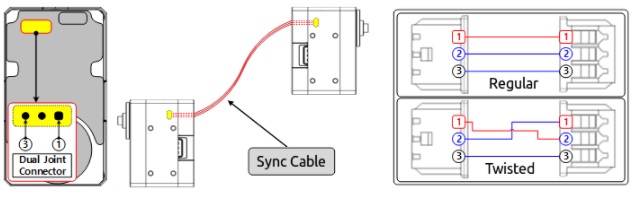
- Senkron kontrol modunu desteklemektedir
- Standby akımı 100ma'den 40ma'e çekilierek enerji tasarrufu sağlanmıştır.
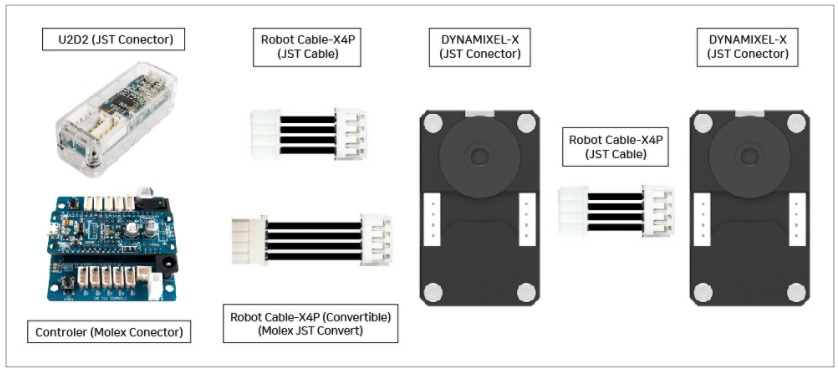
- U2D2 ile PC üzerinden veya bir OpenCM denetleyici ile servo motor kontrolü sağlanmak istenirse bağlantı:
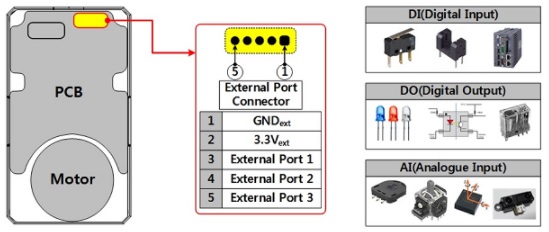
- XM540 serisi, Harici I/O desteği sunmaktadır.
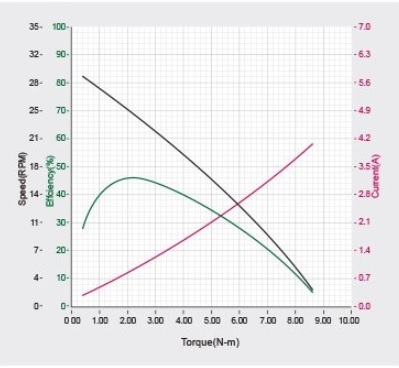
- Performans karakteristiği
Dynamixel-X Servo Aktüatör Genel Özellikleri:
o Tüm Dynamixel-X servo aktüatörler, DC Motor + Mikrodenetleyici + Sürücü + Sensör + Redüktör + Ağ Bağlantı Elemanları bileşenleri barındıran hepsi bir arada (all-in-one) aygıtlardır; enerji ve haberleşme bağlantılarını sağladıktan sonra robot kontrolü ne başlayabilirsiniz. Ücretsiz kaynak kodlar hızlı başlangıç sağlar!

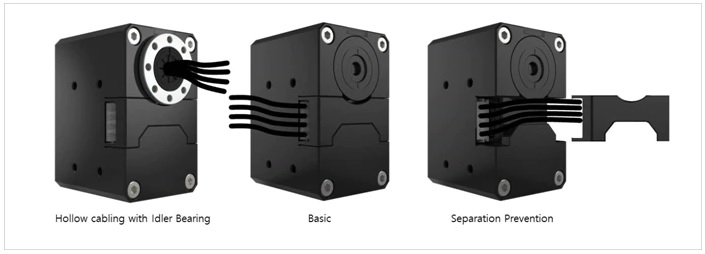
o Dynamixel-X servolar hareket esnasında kablo hasarını önlemek için hareket kısıtlamalarını önleyecek oluklu arka kasa ve 3 farklı kablo yönlendirme (3-way-routing) seçeneğine sahiptir [Avara yatak içinden geçen kablaj(üstten), temel bağlantı(sağ) ve kabarma/ayrılma önleme ile kros kablaj (sol)]
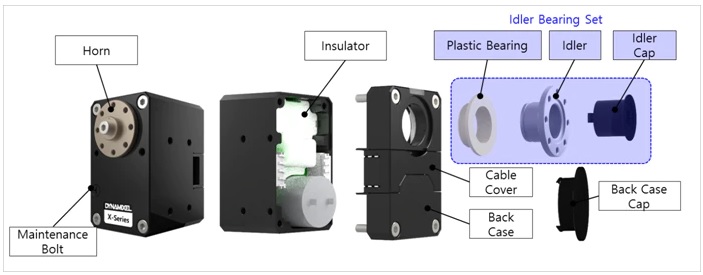
o Dynamixel-X servo motor temel parçalarını tanıyın!
o Dynamixel-X Akıllı Servo Aktüatörlerde Mekanik Özellikler:
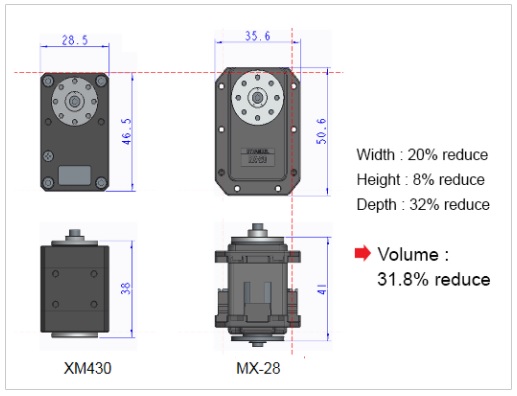
- Dynamixel-X ürünler Dynamixel serisine göre daha kompakt boyutlara sahiptir ve daha yüksek tork sunabilir.
- XH430 lar MX-28'e göre %31, XH540 lar MX-106'ya göre %28 küçüktür!!!
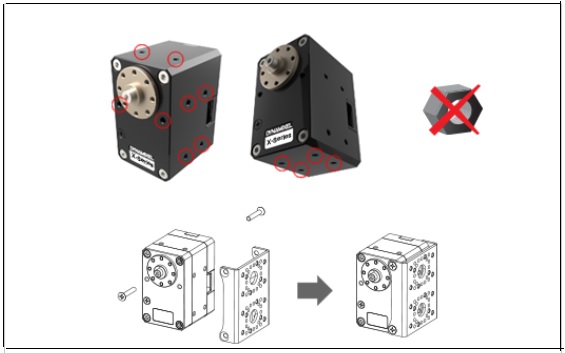
- Gövde üzerine somunsuz vidalama sağlanabilir.
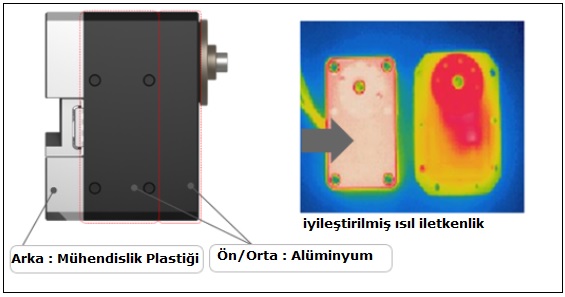
- Alüminyum ve mühendislik plastiğinden dış gövde ve iyileştirilmiş ısıl iletkenlik ve heat-sinking özelliği
o Dynamixel-X aktüatörler farklı geliştirme ortamlarınca desteklenirler (Bknz, aşağıdaki görsel). Robotis'in sunduğu RoboPlus (R+) GUI tabanlı arayüz programları sayesinde simulatif programlama veya ters kinematik uygulamaları yapabilirsiniz. Dynamixel robot servo kontrol kodlarını C, C++, Matlab, C#, Python, ROS, Visual Studio, Visual Basic, LabVIEW, Eclipse, Java ve daha bir çoklarıyla yazabilirsiniz. Tüm bunlar için bir PC ve U2D2 çevirici gerekmektedir!
Ayrıca Dynamixel-X zincir bağlantı (daisy-chain) şeklini destekler ve 253 e kadar servo birbirine bağlanabilir.

o Gelişmiş veri geribesleme ve kontrol modları:
- Konum Kontrolü, Hız Kontrolü, Akım (Tork) Kontrolü, PWM Kontrolü için farklı modlar
- Kullanıcıların hassas hareketler oluşturabilmeleri için konum ve hız kontrolü sağlayan PID kontrol (Dynamixel MX, Dynamixel X ve PRO serileri).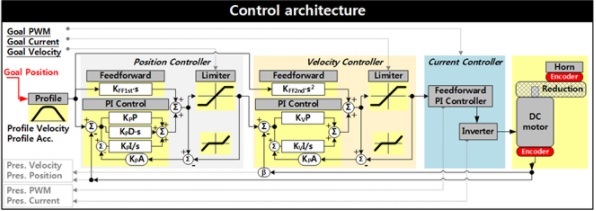
o Dynamixel servo motor çeşitleri
- Başlangıç seviyesinden yüksek performans ürünlere farklı seriler
- Spur dişli gibi alt uçtaki ürünlerden (Dynamixel serisi) sikloid dişli gibi üst uçtaki ( Dynamixel Pro ) ürünlere...
- Dynamixel'in konumlanmasına göre nüvesiz ucuz motorlardan BLDC motorlara doğru faklı parça tercihi
o Humanoid robotlar, endüstriyel robot kol, eğitim robotları gibi yapılarda kullanılabilen Dynamixel-X motorlar sıradışı yapısal özellikler gösteren serilere sahiptir:
- XW serisi IP68 koruma sınıfında ve su geçirmez yapıdadır (1m, 24h)
- Tek modül üzerinde 2 DoF çıkış veren 2XL ve 2XC serisi... Robotların boyun, omuz, bel bölgesinde kullanılan bu servo grubu, 2 farklı servo kullanmaya göre daha az ağırdır ve daha az hacim kaplar!
o Dynamixel-X servo aktüatörlerde isimlendirme: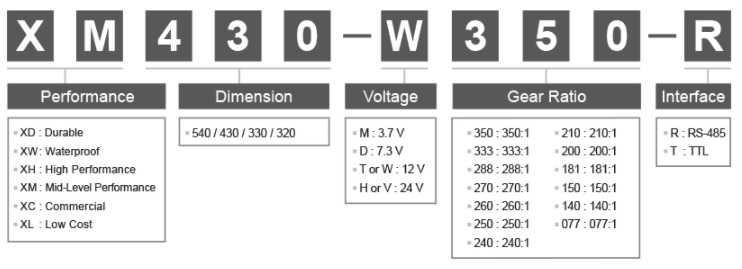
Ürün Özeti ve Paket İçeriği Ürün Teknik Özellikleri:
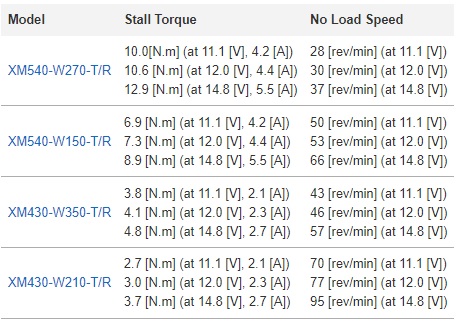
MCU :ARM CORTEX-M3 (72 [MHz], 32Bit) Pozisyon Sensörü :Temazsız Mutlak Enkoder (12Bit, 360 [°]) Motor :Çekirdeksiz Motor Baud Rate :9600 [bps] ~ 4.5 [Mbps] Kontrol Yöntemi :PID Backlash :15 [arcmin] (0.25 [°]) Ağırlık :165g Boyut (WxHxD) :33.5 x 58.5 x 44 [mm] Çözünürlük Açı / Adım / Açı :0.088° / 4096 / 360° Redüksiyon Oranı 272.5:1 Giriş Gerilimi :10.0 ~ 14.8 [V] (Önerilen : 12.0 [V]) Stall Tork -10.0 [N.m] (@11.1 [V], 4.2[A]stall akımı)-10.6 [N.m] (@12 [V], 4.4[A]stall akımı)-12.9 [N.m] (@14.8 [V], 5.5[A]stall akımı)Yüksüz Hız -28 [devir/d] (@ 11.1 [V])
-30 [devir/d] (@ 12 [V])
-37 [devir/d] (@ 14.8 [V])Radyal Yük :40N (Flanştan 10mm uzakta) Eksenel Yük :20N Çalışma Modu(Protokol 2.0)1) Velocity Control (endless turn)2) Position Control (360°)3) Extended Position Control (±256 rev)4) PWM (Voltage) Control (endless turn)5) Current Control (endless turn)6) Current-based Position Control (±256 rev)Çalışma Sıcaklığı :-5℃ ~ +80℃ Fiziksel Bağlantı- TTL Half Duplex Asenkron Seri Haberleşme(8bit, 1stop, No Parity)- Protokol 2.0Link :TTL Level Multi Drop Bus ID ( P2.0) :253 ID (0 ~ 252) Geri Besleme :Pozisyon, Hız, Akım, Sıcaklık, Yük, Giriş Voltajı, Yörünge, Gerçek-zamanlı Tick
Dişli Malzemesi :Full Metal Kasa Malzemesi :Mühendislik plastiği (Arka), Metal (Ön ve Orta) XM540-W270-T İle Kullanılabilen Robotis Ürünleri:
-- Denetleyici:
TTL Dynamixel = OpenCM9.04(+ OpenCM485 Expansion Board), OpenCR1.0, CM-550 RS485 Dynamixel = OpenCM9.04(+ OpenCM485 Expansion Board), OpenCR1.0, -- AraYüz Kartı: USB2Dynamixel, U2D2
-- Frame (Şase) ve Horn (Flanş) Setler:
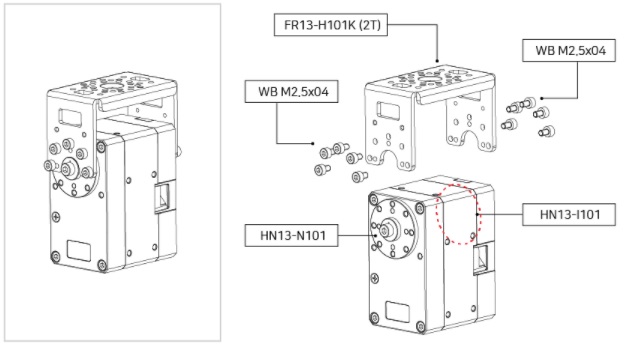
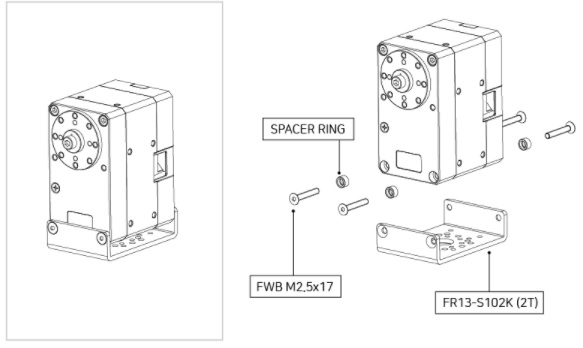
Uyumlu Frame Set = FR13-H101K Set, FR13-S101K Set, FR13-S102K Set Uyumlu Horn Set = HN13-N101 Set, HN13-I101 Set
-- Gear/Bearing Set: X540-270 Yataklı-Dişli SetXM540-W270-T Kutu İçeriği:
- XM540-W270-T x1
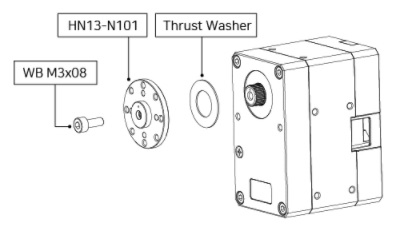
- HN13-N101 Flanş x1 (X540 için standart flanş)
- Teflon Pul ( flanş montajı için ) x1 (flanş ve kasa arası sürtünmeyi azaltır)
- Robot Kablo-X3P 180mm x1 [TTL 3p Kablo(JST-JST)]
- Robot Kablo-X3P (Dönüştürülebilir) 180mm x1 [TTL 3p Cable(MOLEX-JST)]
- Robot Kablo-X3P-Sync 160mm x1 (dual eklem bağlantısı için)
- Alyan Başlı Vida WB M2.5x5 x16 (yandan şase parça montajı için)
- Alyan Başlı Vida WB M2.5x4 x10 (şase parça bağlantısı için)
- Alyan Başlı Vida WB M3x8 x1 (şase parça bağlantısı için)
- Spacer x8 (şase parça bağlantısı için)
Uyarı: Birbirine karışmış kabloları, arka kapağı kapatmadan önce düzenleyin. KAblo ezilmesini önlemek için oluklu yapı içerisinden sadece 1 kablo geçirin.
XM Serisi Karşılaştırma Dynamixel-X ve Dynamixel MX Servolarda Performans Görünümü:
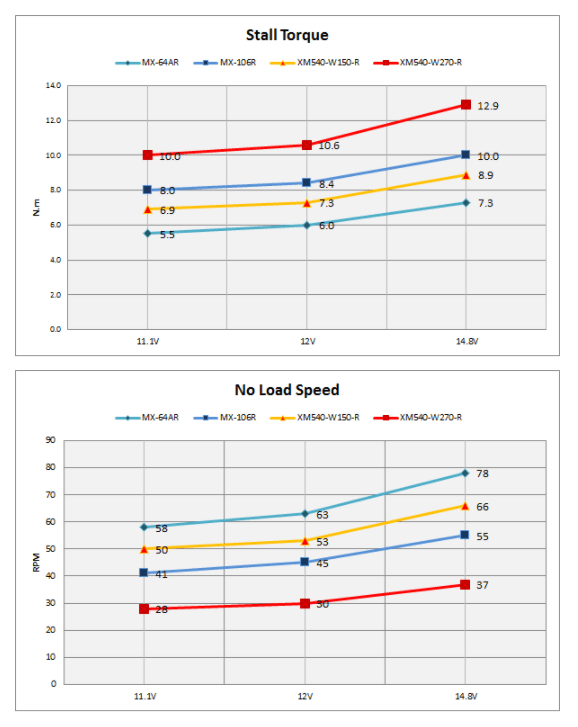
Dynamixel-X XM serisi içinde performans parametreleri:
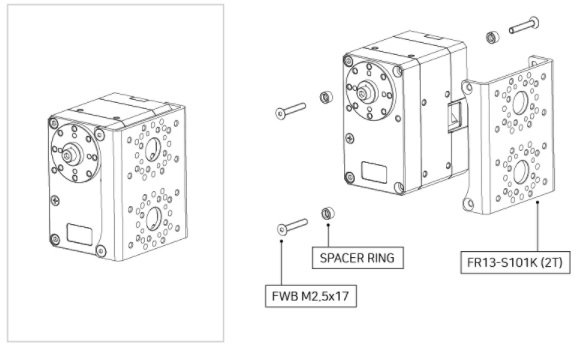
XM540-W270-T ve Farklı Şaseler (Frame Set) ile Çok Yönlü Bağlantı Şekilleri Flanş set parçaları ve montajı
Mafsal olarak kullanılan şase parçası montajı
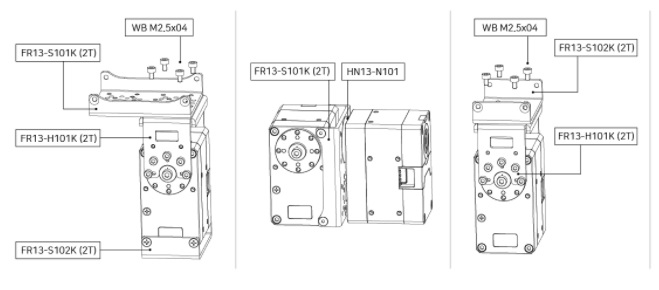
Alttan montajlı şase:
Yan şase montajı:
Şase set bağlanti kombinasyonları:
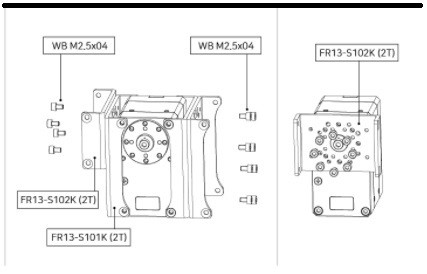
Bağlantılar






















 Servo Motor | 9.5Nm, IP68")





