
 Tüm Kategoriler
Tüm Kategoriler 



- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
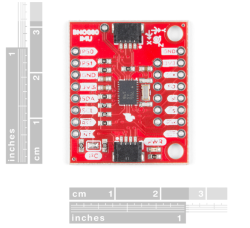
SparkFun VR IMU Breakout BNO080 QWICC
SparkFun VR IMU kartı VR (virtual reality - sanal gerçeklik) uygulamaları için geliştirilmiş bir IMU (inertial measurement unit) kartıdır ve VR teknolojilerine yüksek meblağlar ödemeden bu teknolojiyi kazanmanızı sağlamaktadır. Kart üzerinde hareketin ilgili özelliklerini algılayan Bosch BNO080 SiP entegresidir ve bu entegre içerisinde akselerometre, jiroskop ve magnetometre bir 32-bit ARM Cortex M0+ ile birlikte tasarlanmıştır. BNO080 IMU entegresi dönme (rotasyon) vektörünün yönlenmesini göstern çıkışı üretmekte bu da VR gibi yönelim algılama gerektiren uygulamalarda 2 derece veya daha düşük statik rotayon hatasıyla sonuçlar üretmektedir.
Tüm sensör verileri kayma-düzeltmeli (drift-corrected) ve hassas IMU paketleri halindedir. Dolayısıyla oryantasyon ve hareket projeleri mükemmel sonuçlar üretir. Kart üzerindeki en yeni ve gelişmiş özelliklerden biri de I2C haberleşme ile birçok SparkFun ürününü bağlamanızı sağlayan Qwiic bağlantı sistemidir. Qwiic sistemi Sparkfun veya Arduino geliştirme kartları ile Sparkfun sensörler, breakout kartları ve shieldları, birbirleri arasında I2C protokolü üzerinden kontrol etmek için, lehimleme gerektirmeyen ve JST konnektörlere sahip kablolar ile zincir bağlantı şeklinde bağlantıya imkan veren bir kablolama şeklidir.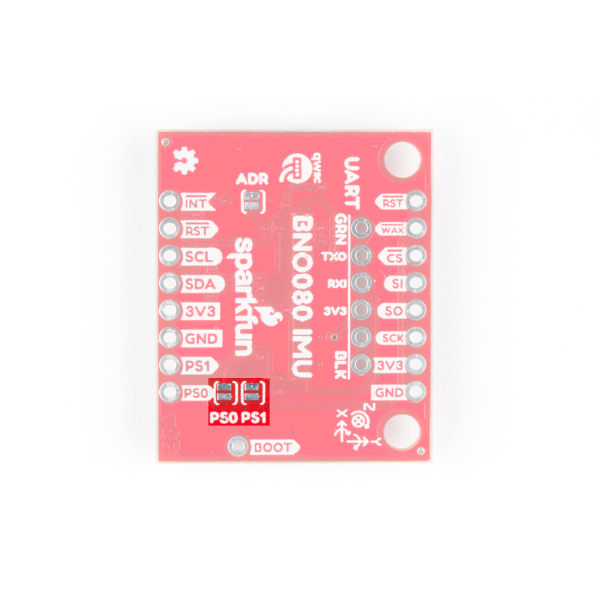
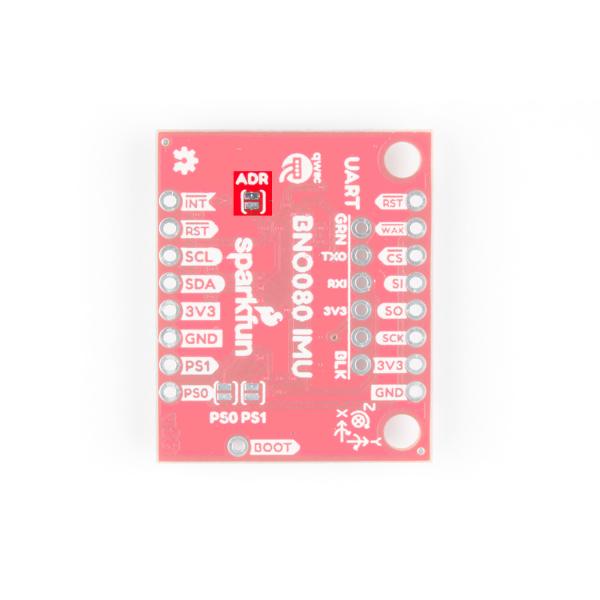
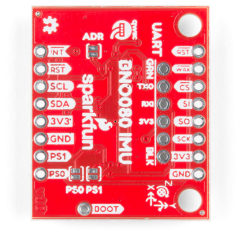
SparkFun VR IMU kartı, haberleşme arayüzü olarak birden fazla seçeneğe sahiptir, bunlar: I2C, SPI ve UART'tır (Herbir arayüz için haberleşme hızlarını görmek için "ÖZellikler" bölümüne bakınız!). Bu protokoller SP0 ve SP1 jumper bağlantılarının farklı kombinasyonları ile seçilebilir (üstte) ve ayrıca I2C haberlşemede adres 0x4B (varsayılan) ve 0x4B arasında ADR (üstte) jumperı ile ayarlanabilir. SP0 ve SP1 jumperların durumuna göre seçilen protokoller aşağıdaki tabloda verilmiştir:PS0 PS1 Arayüz 0 0 I2C 1 0 UART-RVC 0 1 UART 1 1 SPI
Qwiic konektörün yanında Boot' pini bulunmaktadır. Bu pin haberleşme modunu konfigüre etmek için kullanılmkatadır. Boot' pini resetleme veya güç verme sebebiyle "low" durumundaysa entegre yeni firmware yazımı için bootloader moda geçecektir.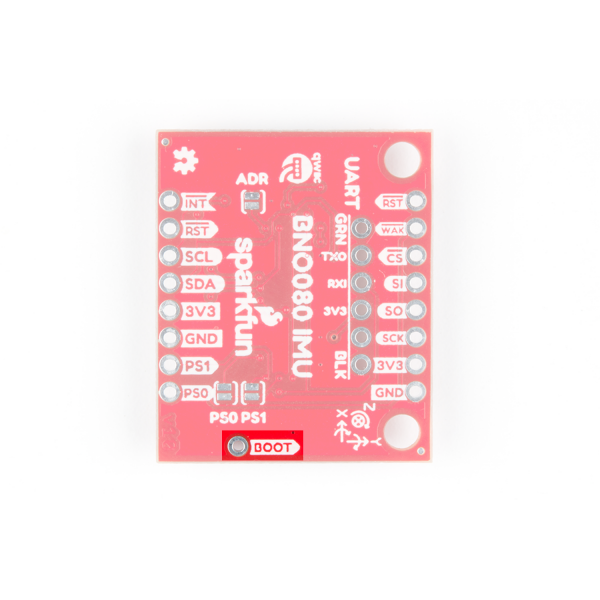
Özellikler (ÖZET)
o Çalışma Gerilimi: 1.65V - 3.6V
o I2C (Varsayılan): 400kHz'e kadar haberleşme desteği
o SPI: 3MHz'e kadar haberleşme desteği
o UART: 3Mbps haberleşme desteği
o Döndürme Vektörü (Rotation Vector)
o Dinamik Hata: 3.5 °
o Statik Hata: 2.0 °
o Oyun için Döndürme Vektörü
o Dinamik Hata: 2.5 °
o Statik Hata: 1.5 °
o Yön Kayması: 0.5 °/dak
o Jeomanyetik Dönme Vektörü
o Dinamik Dönüş Hatası: 4.5 °
o Statik Dönüş Hatası: 3.0 °
o Yerçekimi Açısı Hatası: 1.5 °
o Doğrusal Hızlanma Doğruluğu: 0.35m/s2
o İvmeölçer Doğruluğu: 0.3m/s2
o Jiroskop Doğruluğu: 3.1 °/sn
o Manyetometre Doğruluğu: 1.4µT
o 2 adet Qwiic Bağlantı PortuBağlantılar
-
 538,87 TL + KDV
538,87 TL + KDV -
1.068,03 TL + KDV
-
388,37 TL + KDV
-
30,10 TL + KDV
-
39,32 TL + KDV



