
 Tüm Kategoriler
Tüm Kategoriler 

Stokta Yok




562.318,51 TL + KDV
674.782,22 TL (KDV Dahil)
Yorum Ekle
Stokta Yok
Stoğa Düşünce Bildir
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
ROBOTIS OpenMANIPULATOR-PRO Robot Kol Platformu (RM-P60-RNH)
Robotis OpenManipulator-PRO, temel amacı eğitim ve araştırma (R&D) olan buna bağlı olarak kinematik-dinamik deneylerinde, iki kollu robot sistemlerini konu alan tasarım çalışmalarında ve mobil robot projelerinde tercih edilen bir robot koldur; ayrıca donanım ve yazılım olarak açık kaynaktır. OpenManipulator-PRO parçaları 3D yazıcılarda üretilebilecek şekilde üretim dosyaları Robotis tarafından sağlanırken, kol kontrolü ROS ve OpenSource üzerine temellenmiştir. Ayrıca sistemi MoveIt! paketiyle ilişkilendirerek daha kolay kontrol edebilir ve fiziksel olarak robotla çalışmak istemediğinizde GAZEBO üzerinde simülasyonlar planlayabilirsiniz.
Robotis OpenManipulator-PRO, her biri yüksek performanslı Dynamixel Pro H serisi servo ile donatılmış 3 eklemden oluşan, 6 serbestlik derecesine sahiptir. Endüstriyel otomasyonda da kullanılabilen Robotis OpenManipulator-PRO, düşük ve orta boyutlu (payload= 3kg) aktarım-taşıma işlerinde tercih edilmektedir. Servo aktuatörlerin tümü bir DC motor, bir servo kontrol, bir sürücü, bir sensör ve bir sikloid tipi redüksiyon dişli sistemi kullanır. Bütün motorları montajlanmış bir Robotis manipülatör için tavsiye edilen çalışma gerilimi 24 Volttur ve 15A ve üzeri akım sağlayabilen bir kaynak uygun olacaktır.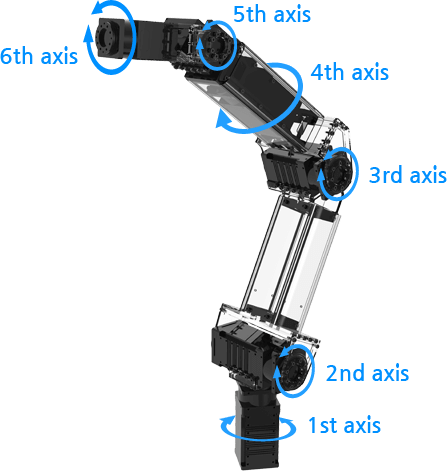
Bakımının kolayca yapılabilmesi ve kolay aktarım için modüler bir yapıya sahiptir ve oldukça hafiftir. OpenManipulator-PRO eklemlerindeki döner kodlayıcı, mutlak kodlayıcı ve bir sensör tarafından sağlanan kapsamlı geri bildirim sayesinde ultra hassas bir tork, konum, hız ve akım kontrolü ile her yöne hareket edebilen bir robot kol elde edersiniz. Ürün üzerinde USB ve RS-485 arayüzleri mevcuttur.
Ürün Özellikleri (Özet)
- DOF: 6
- Payload : 3kg
- Tekrarlanabilirlik (Repeatabiliy - mm): ± 0.05
- Hız (Her bir mafsal için derece / saniye): 180
- Ürün ağırlığı: 5.5kg
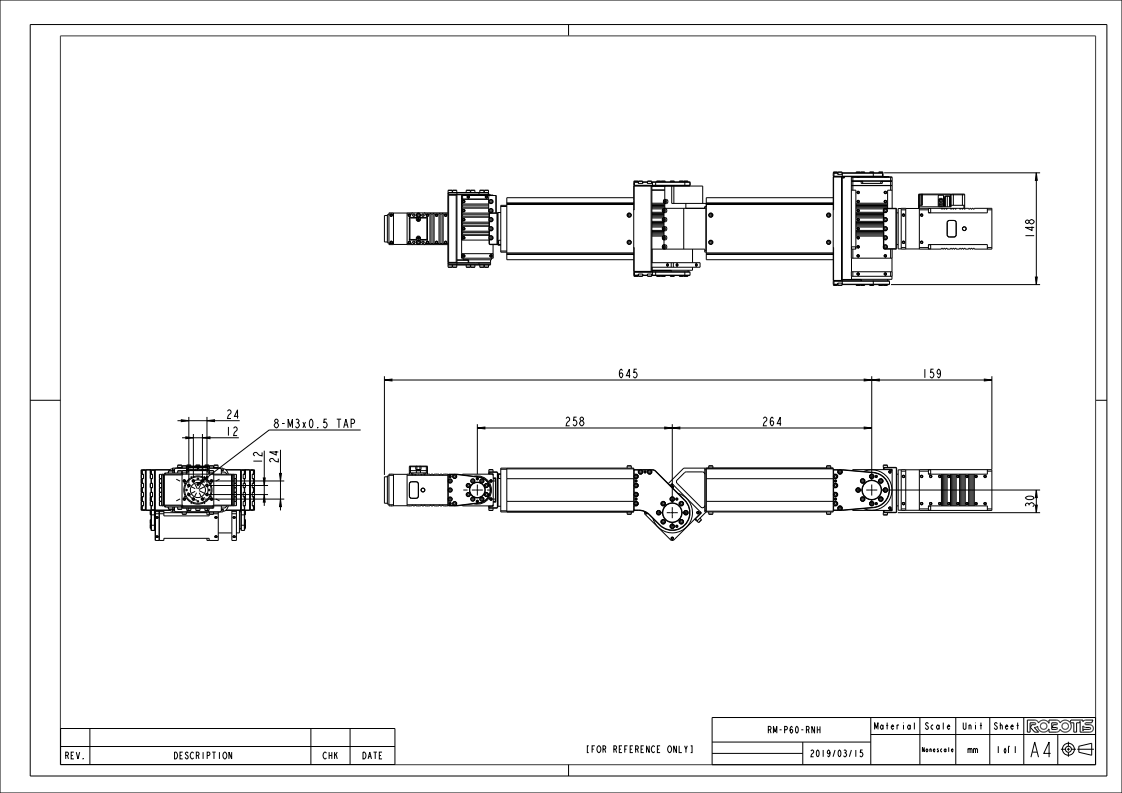
- Uzanım (mm): 645
- Nominal gerilim (VDC): 24
- Haberleşme arayüzü: RS-485
- Yazılım: ROS (Ubuntu Linux)
- Motor Güçleri (Her bir eklem için):
200W: Eklem 1-2 (akıllı servo kodu:H54P-200-S500-R , fırçasız)
100W: Eklem 3-4 (akıllı servo kodu:H54P-100-S500-R , fırçasız)
20W: Eklem 5-6 (akıllı servo kodu:H42P-20-S300-R , çekirdeksiz)
- Denetleyici: PC üzerinden kontrol sağlanır
- Çözünürlük:
-Eklem çalışma aralığıEklem 1 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse)
Eklem 2 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse)
Eklem 3 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse)
Eklem 4 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse)
Eklem 5 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse)
Eklem 6 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse)Eklem 1 : -π(rad) ~ π(rad)
Eklem 2 : -π/2(rad) ~ π/2(rad)
Eklem 3 : -π/2(rad) ~ 3π/4(rad)
Eklem 4 : -π(rad) ~ π(rad)
Eklem 5 : -π/2(rad) ~ π/2(rad)
Eklem 6 : -π(rad) ~ π(rad)
- Varsayılan ID'lerEklem 1 (ID:1), Eklem 2 (ID:2), Eklem 3 (ID:3),
Eklem 4 (ID:4), Eklem 5 (ID:5), Eklem 6 (ID:6)
- Bütünleşik Yapı
o DC Motor + Kontrol Cihazı + Sürücü + Sensör + Sikloid Redüktörlü Dişli
- Hassas kontrol ve düşük backlash
o Mutlak konumlandırma için artımlı kodlayıcı ve temassız manyetik kodlayıcı
o 3 ~ 4arcmin'lik düşük backlash
o Performans verileri, KOLAS (Kore Laboratuvarları Akreditasyon Şeması) tarafından test edilmiştir
UYARI: Güç kaynağı ve programlama için kullanılacak PC pakete dahil değildir. Ürün teslimi 6 haftalık bir süreci kapsayabilir!
Temel Kullanım ve Bağlantılar
OpenMANIPULATOR-PRO'yu edindikten sonra kullanmanız için edinmeniz gereken farklı ürünler de vardır. Bunlar SMPS güç kaynağı, ürünü sabitlemek için montajlama plakası (base plate)'tir. ROS komutları ile geliştirme yapılacaksa U2D2 + U2D2 Güç kartı (power expansion hub) gerekmektedir (aşağıdaki şekilde tüm elemanlar görülmektedir).
ROS ile uygulama yapmak istediğinizde PC'nize Linux (Linux Ununtu 16.04 OS ) ve ROS Kinetic Kame kurulmalıdır. Bu adımdan sonra ise Robotis'in ROS paketleri kurulmalıdır!Ardında şu adımlar takip edilebilir:
1) Manipulator Manager uygulaması başlatılmalı ve ayarlar (RViz) kontrol edilmelidir
2) GUI programınından OpenMANIPULATOR-PRO'yu kullanmak için faydalanabilirsiniz. Bu program robot kolun durumunu gösterir ve kullanıcıların OpenMANIPULATOR-PRO'yu kontrol etmelerini sağlar.
3) OpenMANIPULATOR-PRO, MoveIt! ile de kontrol edilebilir. Kontrol paketi MoveIt! ile çalıştırılır. Bunu yaparken denetleyici paketinin (controller package) başlatma dosyasında (launch file) yer alan değişkenler ayarlanır.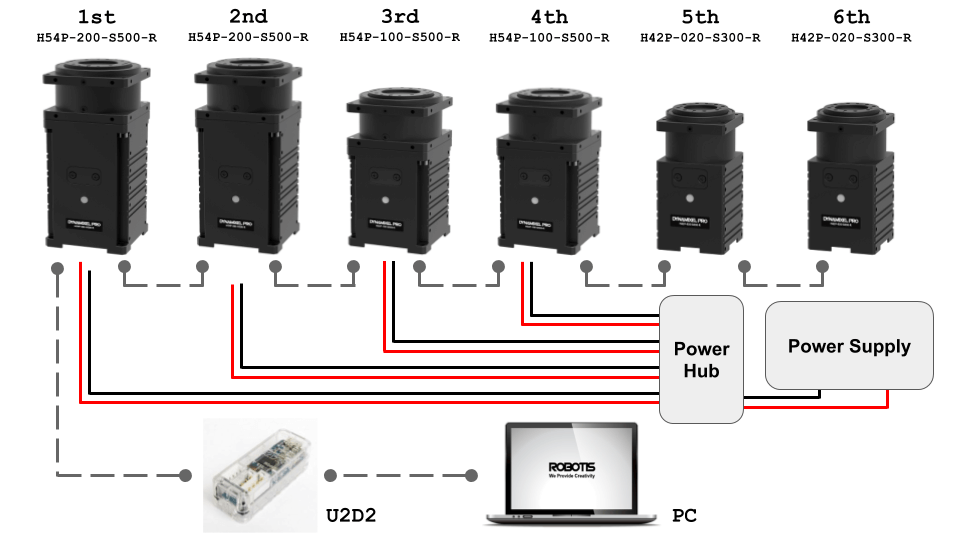
Paket İçeriği
- Ürün: Robotis OpenManipulator-PRO (tamamen monte edilmiş)
- Saklama: Sert plastik bavul (x1)
- PC Arayüzü: U2D2 (x1)
- Aksesuarlar:
o 4P ve 2P kablolar (1 set)
o Vida takımı (WB M2.5)(x1)
o 4P genişletme Hubı (x2)
Çalışma Alanı, Uzanım ve Boyutlar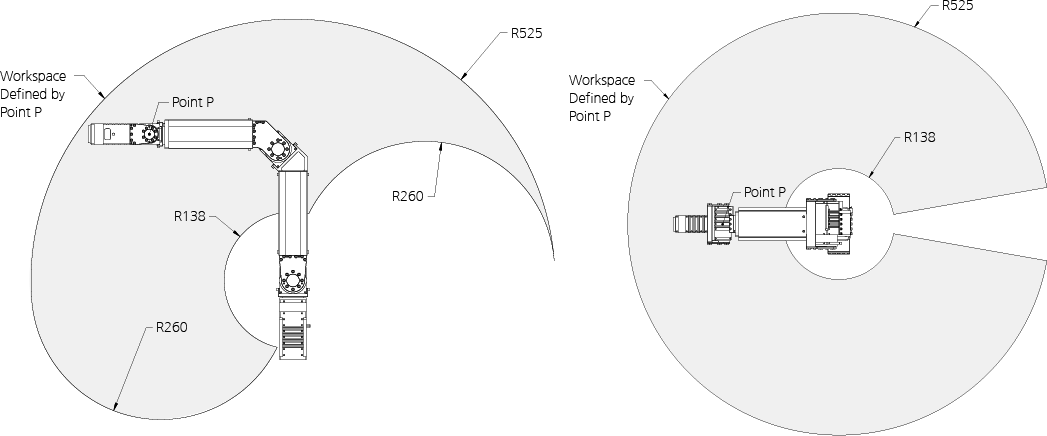
Bağlantılar
o e-kılavuz
o SDK
Benzer Ürünler
-
") 216.312,20 TL + KDV
216.312,20 TL + KDV -
140.806,27 TL + KDV
-
494.602,22 TL + KDV
-
33.269,48 TL + KDV
")
")
 Robot Kol, 3.5Kg, 700mm, 7 DoF, ver D")
 Robot Kol, 3.5Kg, 700mm, 7 DoF, ver B")
 Robot Kol, 5Kg, 700mm, 6 DoF, ver B")
 Robot 3Kg, 700mm, 5 DoF, ver C")
 Robot 3Kg, 700mm, 5 DoF, ver B")

, 1Kg, 440mm, 6DoF")

 Robot 3Kg, 700mm, 5 DoF, ver A")
")